|
| |
|
|
|
|
|
|
|
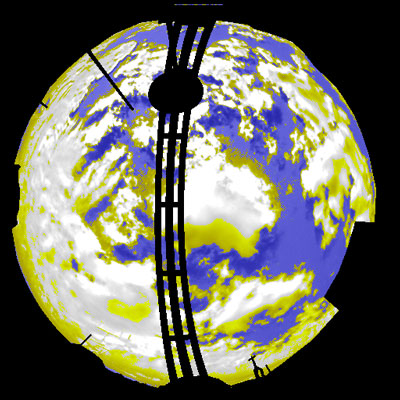
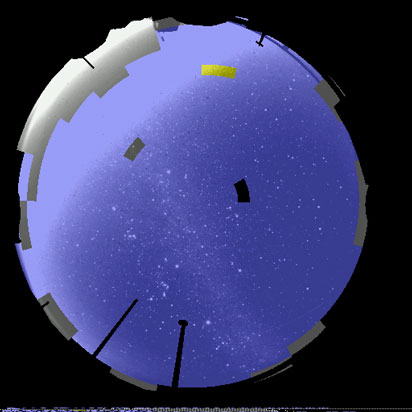
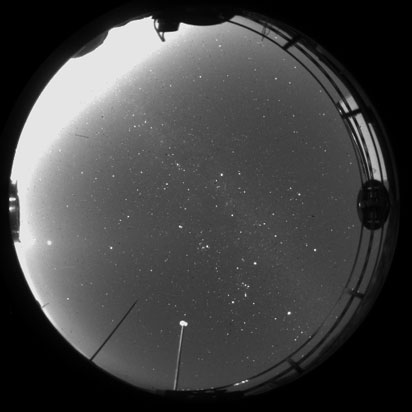
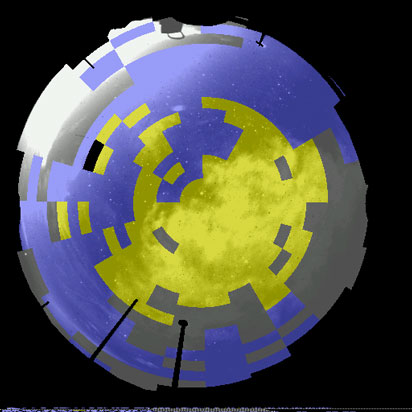
Improved Cloud Detection AlgorithmsIn the last couple years, the Day Cloud Algorithm was converted for use in real time algorithms, on a Windows system. It was also converted to run with the new Day WSI and its camera and computer hardware configuration on a Windows system. In addition, a real-time night algorithm was developed. Although we contributed several of the concepts involved in the archival-version cloud algorithms used by the ARM program, these are not discussed here, as we are not cognizant of the final details of the algorithm. During the process of converting the Day algorithms, several improvements were made, including more accurate handling of the lens geometry, better bit resolution, better clear sky libraries, and masking the occultor from the decision image. The handling of sunrise and sunset has been improved on the Day WSI, but not yet incorporated into the D/N WSI systems. We have also devised approaches for utilizing the data acquired at 800 nm or 850 nm in the systems. The NIR filter was added to the WSI because we felt we would achieve better contrast between thin clouds and background sky, and potentially be able to distinguish aerosol haze from the larger-droplet thin clouds. This part of the algorithm has not yet been developed. Sample results for the current daytime algorithm are shown below.
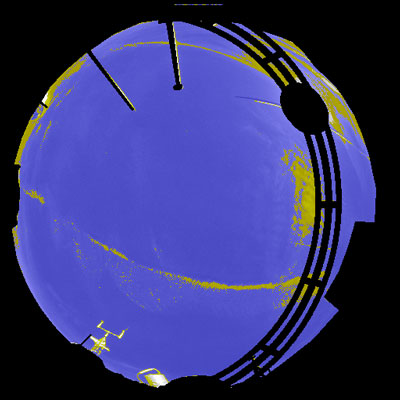
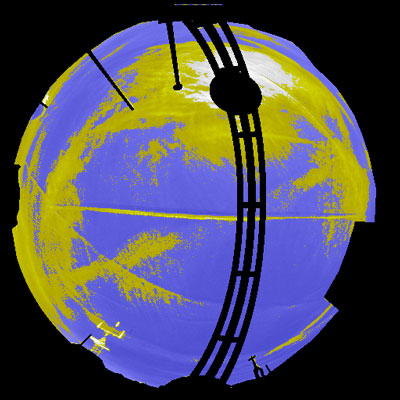
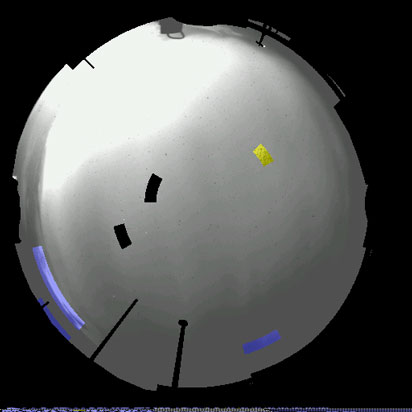
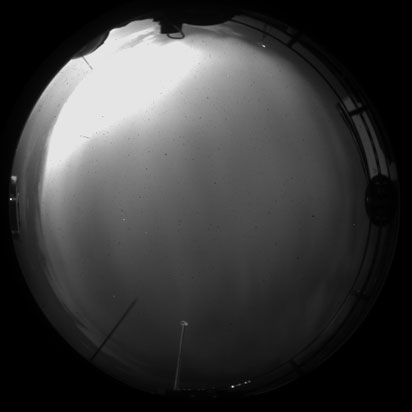
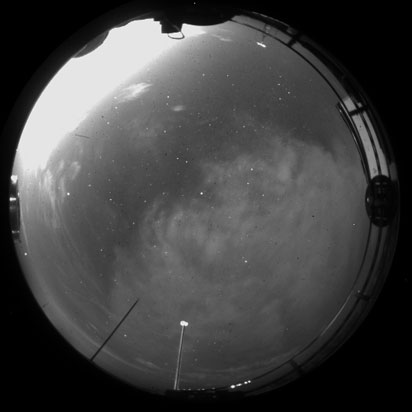
A real-time night algorithm has also been developed. This algorithm is based on the detection of stars within regions of the sky. Using a high-accuracy angular mapping for the system, we are able to predict the anticipated location of stars in a star library, and then detect them in the image by the presence of a Gaussian point spread function. The level of the background behind the detected stars, as well as the area under the Gaussian, are computed, and the star detection is based on the contrast between the energy from the star and the background. The contrast thresholds are a function of star magnitude, as well as moon phase. They also vary with look zenith angle based on the theoretical changes in beam transmittance as a function of zenith angle. Also, the contrast threshold is different in cells affected by the city lights, which should yield fewer false calls due to the city lights. At present the night algorithm makes a decision in each of approximately 300 cells, based on the detection of stars within that cell. We have also devised methods for extending the cloud algorithm to yield a higher spatial resolution (pixel by pixel), but have not yet been funded to pursue this work.
Produced
by the Marine Physical Laboratory, SIO.
|